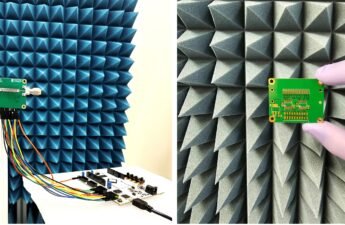
The iRonCub was developed by the Italian Institute of Technology (IIT). A project that took many years.
Source: IEEE Spectrum
The latest on iRonCub comes from a paper that’ll be published in a January issue of IEEE Robotics and Automation Letters. You can find the paper here.
The article claims that was used an extended Kalman filter (EKF) to estimate the thrust of jet engines. Click on the button below to have an introduction about the Kalman filter.
The obvious question is, why? Besides the fact that it’s totally cool, there are plenty of practical reasons to pursue this research. Here’s how Daniele Pucci, head of the Artificial and Mechanical Intelligence lab at the Center for Robotics and Intelligent Systems at the Italian Institute of Technology (IIT), describes the importance of aerial humanoid robots.
I believe that the benefits are many. First, there are technological benefits. Aerial humanoid robotics extends aerial manipulation to a more robust and energy efficient level. In fact, aerial manipulation is often exemplified by quadrotors equipped with a robotic arm. These robots can’t move around by means of contact forces with the environment, and they often struggle with flying in windy environments while manipulating an object, requiring precise position control for accomplishing manipulation tasks. So the extra hand of a flying humanoid robot could establish a contact point between the robot and the environment, thus making the robot position control simpler and more robust.
Another benefit is social. I truly believe that aerial humanoid robotics can be used as a test-bed for actuated flying exoskeletons for human beings. The recent successful story of [jet suit inventor] Richard Browning shows the engineering feasibility of these futuristic actuated exoskeletons. However, the journey in front of us is still long, and we can use flying humanoid robots to boost this journey and avoid lots of tests on humans.
Finally, there are scientific benefits as well: In my humble opinion, controlling a flying humanoid robot leads to a number of theoretical and practical questions. For instance, a general control framework encompassing manipulation, contact-locomotion, and flight is still missing, and the role of the auxiliary (jet?) actuation during contact locomotion of humanoid robots is not clear. For instance, what is the walking speed at which it is more energetically convenient to turn the auxiliary actuation on? How do we deal with landing impacts for smooth transitions between flight and walking?
The next step is to make a controlled flight.