
Este é um kit de um braço robótico 6 DOF com peças de alumínio para montar. Não vem com servomotores e nem com um manual de instruções.
Sobre o kit
DOF vem de Degrees Of Freedom (graus de liberdade), já foi publicado um post sobre este conceito.
Estas são todas as peças do kit.

Montando o braço robótico
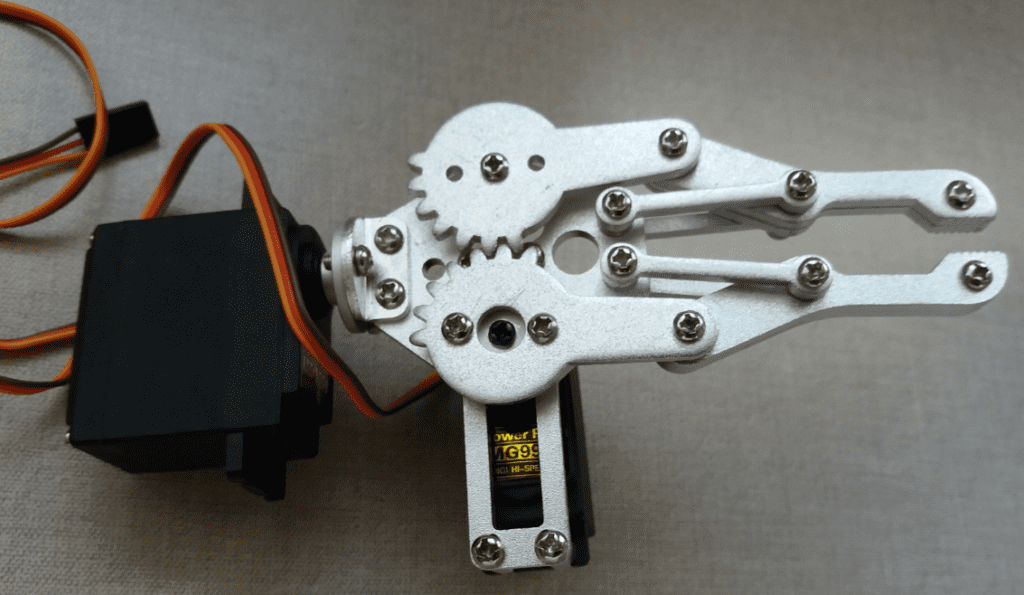
Garra

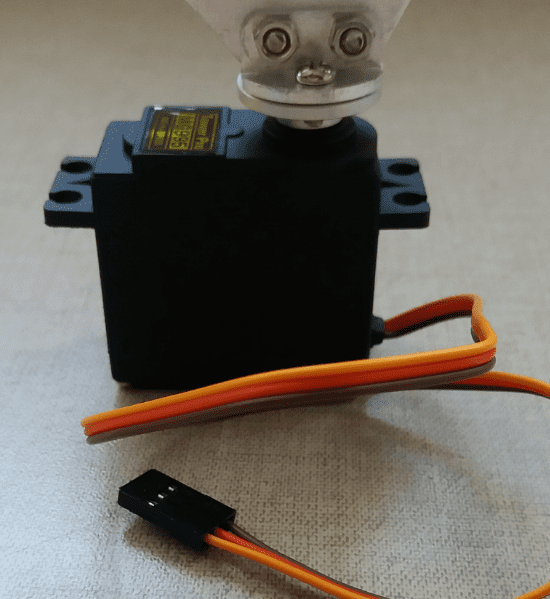
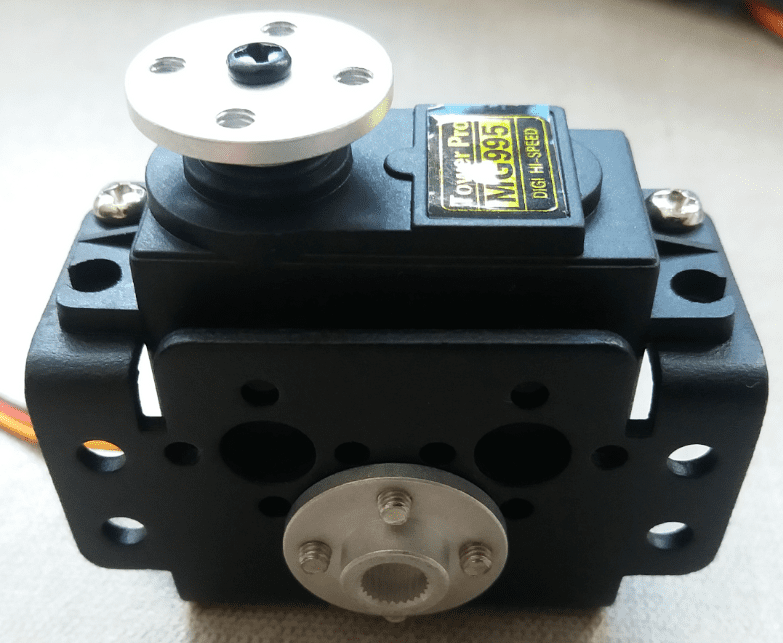
O primeiro passo foi instalar 2 servomotores MG995 na garra prateada. O servomotor para este braço robótico deve ter alto torque, o MG995 tem um torque de 9,40 kg·cm a 4,8 V e 11 kg·cm a 6 V. Servomotores da Futaba e Hobbico não servem para esta aplicação, devido ao torque baixo.

Esta peça deve ser ligada à garra. Bastam dois parafusos curtos.

O disco pode ser facilmente encaixado no eixo do motor.

Outro servo deve ser colocado nesta parte.

4 parafusos são colocados para prender o motor aos pequenos tubos.
Colocando um disco no eixo. Dois parafusos devem ser usados para prender o disco à engrenagem solta da garra.

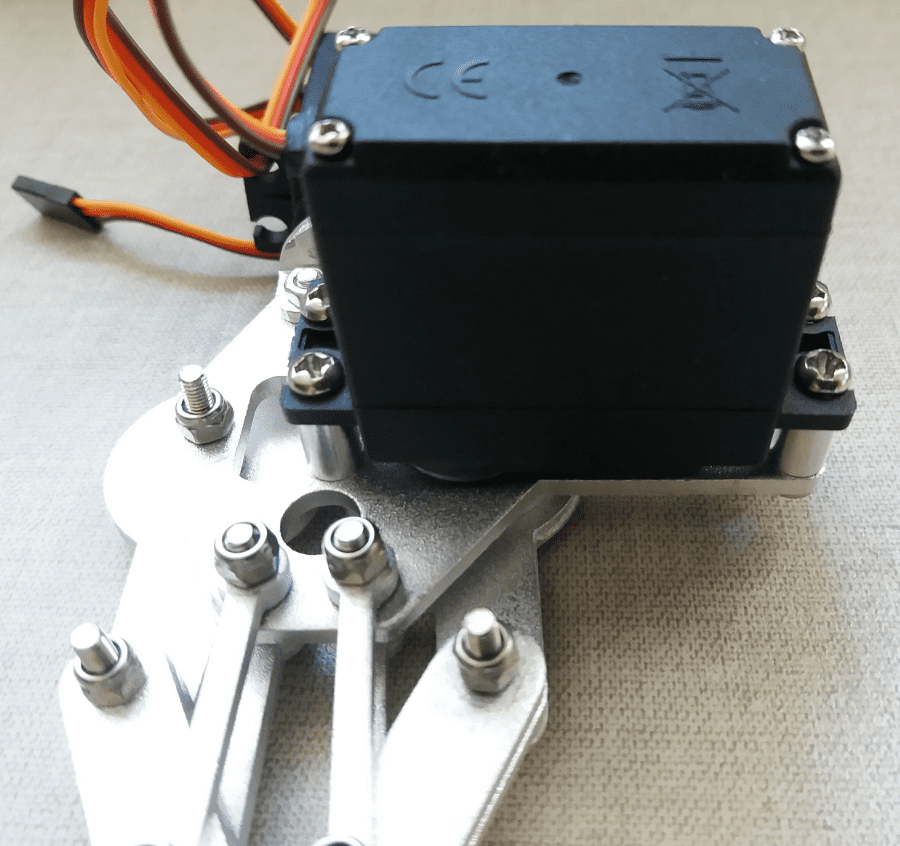
A garra completa com dois servomotores.
Sustentação da garra
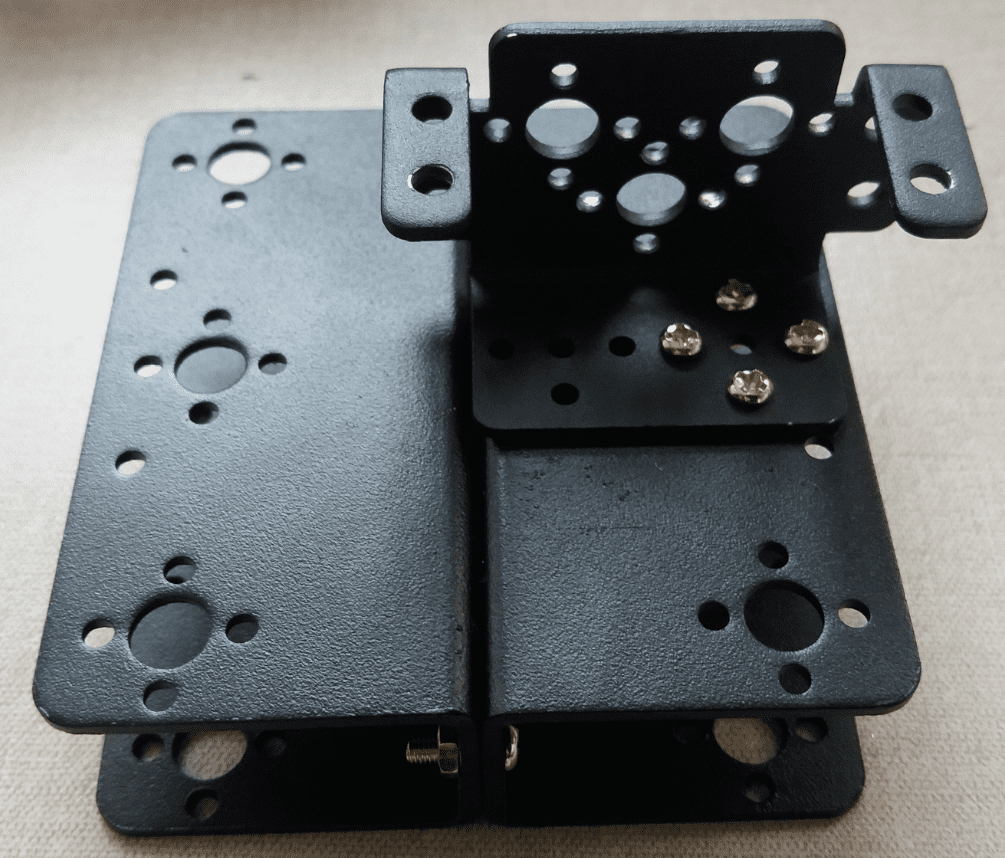
Esta peça é usada para colocar os atuadores.

Estas duas peças iguais devem ser unidas por 2 pequenos parafusos e 2 porcas.

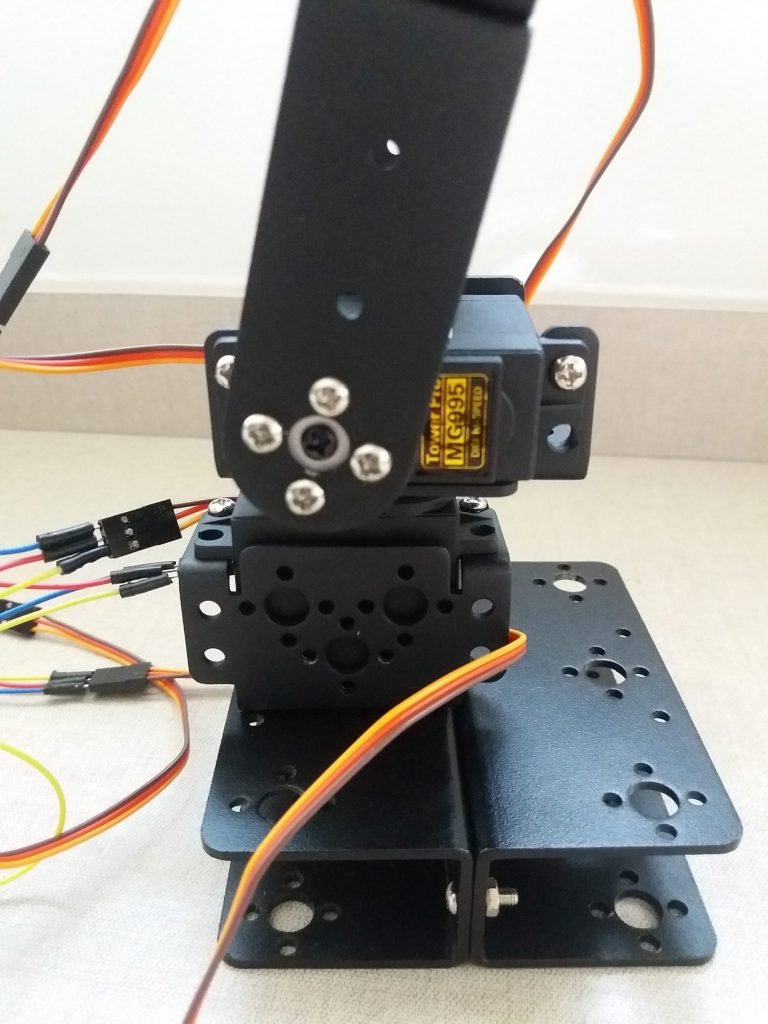
Colocando a peça acima na garra para o terceiro motor.

Terceiro servomotor instalado.

Deve-se colocar um disco no servo para ser conectado ao suporte da garra.

Ligando uma peça grande em forma de “U” na garra com 4 parafusos curtos.


Usando estas peças para colocar mais um servo.



E devem ser ligadas ao resto do braço robótico.

O próximo passo é juntar duas peças em forma de “U” com dois parafusos e porcas.

Base do braço robótico 6 DOF
A última parte é montar a base de sustentação. Tem que unir estas peças compridas em forma de “U”.

Este componente vai ligar os motores que faltam.

Colocando o quinto atuador no resto do braço.

Construindo a base.
Integrando o atuador da base ao braço.

Braço robótico montado com a base.
O braço completo com todos os 6 graus de liberdade. Com esta base, o robô vai se desequilibrar quando fizer certos movimentos, logo, é preciso usar alguma coisa para fixar a base para impedir o tombo. Como uma cola, parafusos ou mais peso na base.

Como controlar o braço robótico 6 DOF? Dá para controlar usando Arduino e as linhas de código mostradas no tutorial 3.
Tutorial de Arduino (Parte 3)Clique aqui
Mas este método é difícil e complicado para a aplicação presente. Outra alternativa é usar uma placa feita para controlar vários servomotores como a PCA9685. O uso deste driver será assunto para outro post.

{kind=link}