
O assunto deste post são os graus de liberdade (DOF). O conceito na mecânica e como calcular DOF em um sistema mecânico.
Definição na mecânica
Graus de liberdade ou mobilidade são o número de variáveis que indicam a posição de um mecanismo. Cada eixo das coordenadas x, y e z é um grau de liberdade de translação.
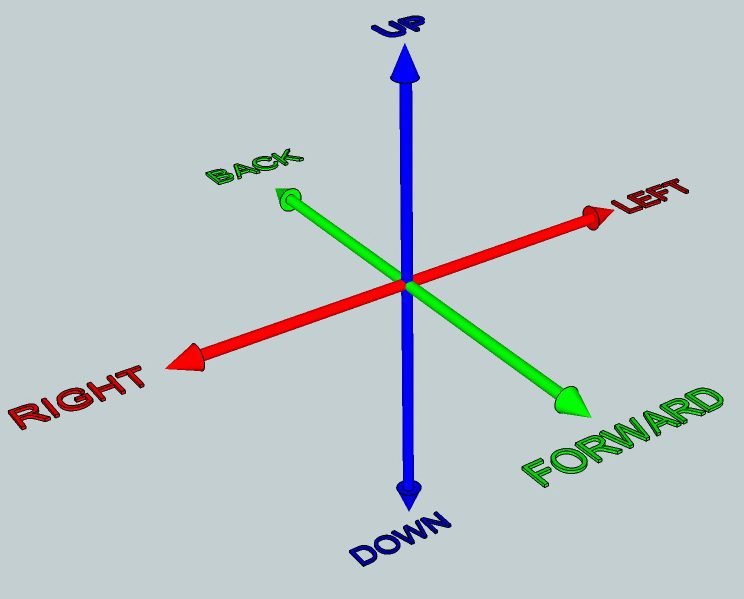
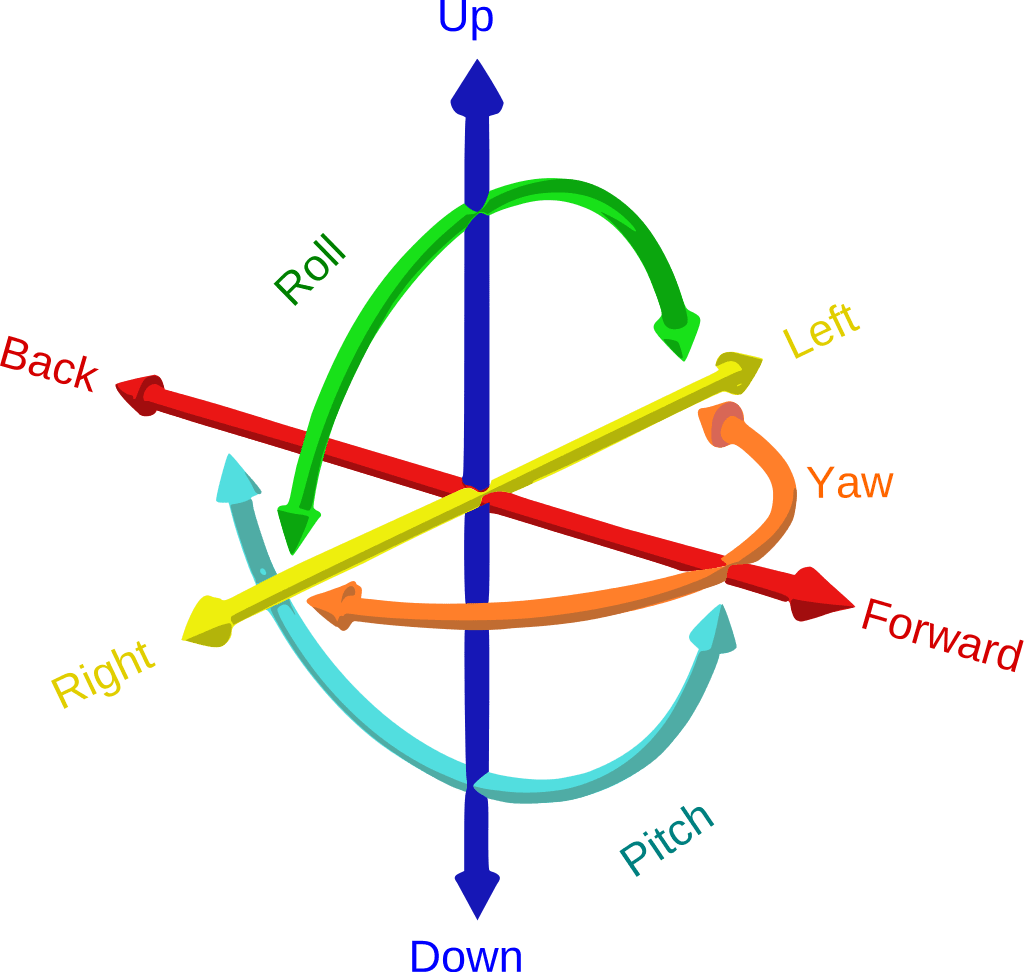
E cada movimento de rotação perpendicular a um dos eixos é um grau de liberdade rotacional.
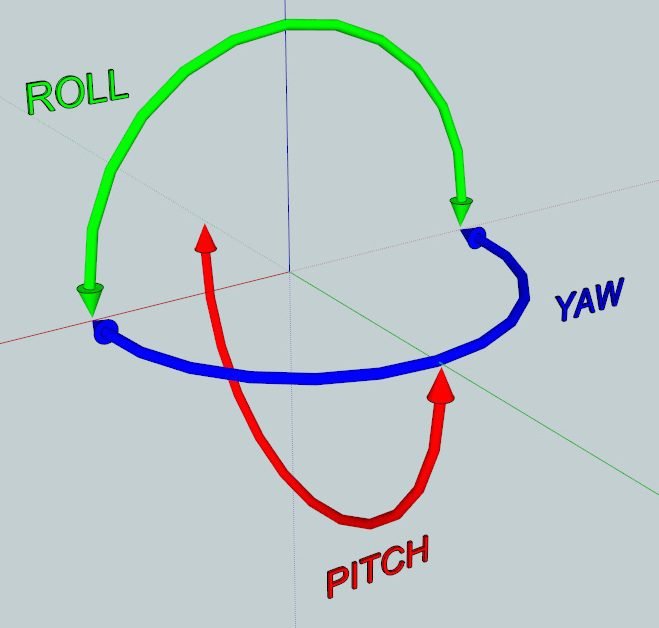
Portanto, um corpo que se movimenta em um espaço tridimensional tem no total 6 graus de liberdade.
A figura abaixo mostra vários sistemas de pares de objetos e seus graus de liberdade (DOF) entre parênteses.
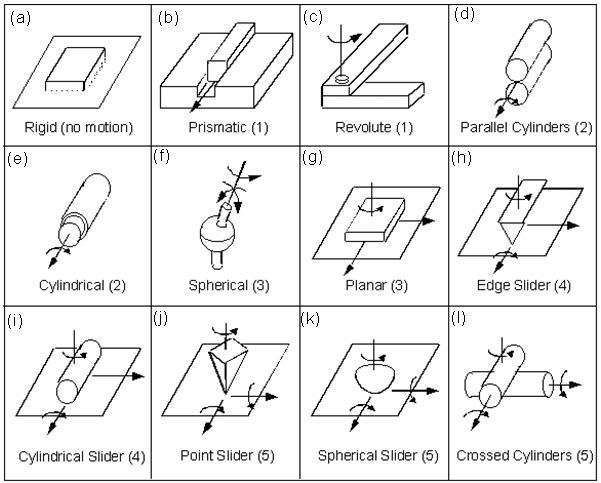
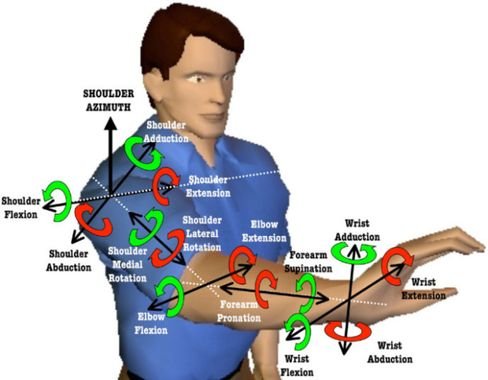
É possível um sistema mecânico ter mais de 6 DOF? A resposta é sim, o braço humano tem 7.
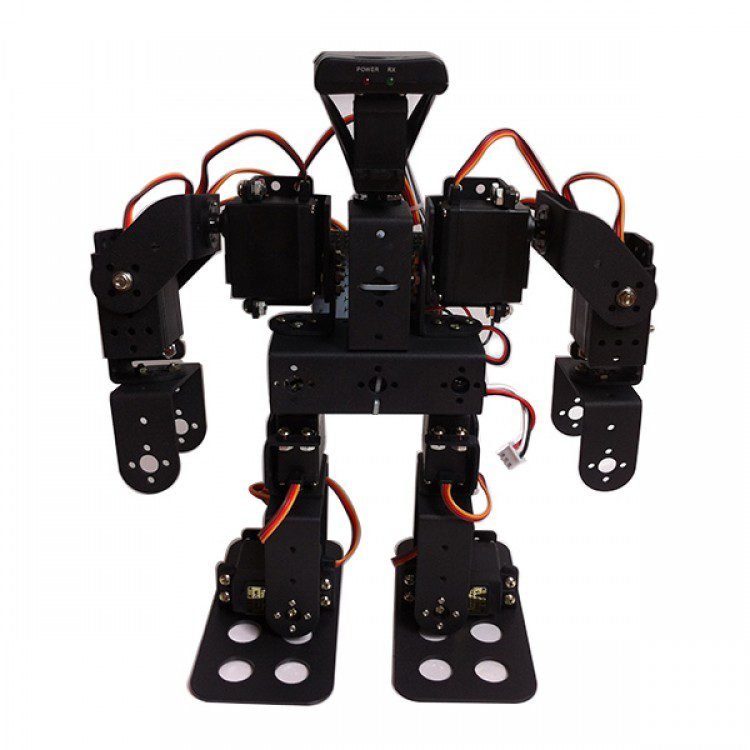
Este robô humanoide possui 9 DOF.
Determinando graus de liberdade
E sistemas mecânicos mais complexos? Como calcular o número de atuadores necessários para mecanismos como este?

Equação de Grübler
Esta é a equação para calcular a mobilidade.
DOF=m(N-1)-\sum_{i=1}^{J}(m-f_{i})
- N: O número de elos. Um elo é uma peça que pode se conectar com outras peças. Pode ser a superfície ou carcaça.
- J: O número de pares ou juntas, que ligam dois elos.
- m: A mobilidade de um corpo. Conforme mostrado anteriormente, 6 em um espaço tridimensional e 3 em um plano.
- f_{i}: O número de graus de liberdade no par i.
Usando este sistema como exemplo. Tem 4 elos N=4 e 4 juntas J=4. m=3 pois está em um plano.

Dois corpos separados no plano possuem DOF=6. Quando estes corpos estão ligados por uma junta, perdem 2 e ficam com DOF=4, portanto f_{i}=1. Calculando a mobilidade.
DOF=3(4-1)-\sum_{i=1}^{4}(3-1)
DOF=3(4-1)-4\cdot (2)=9-8=1
Quantos DOF tem esta máquina com uma junta dupla e uma barra deslizante? N=8 e m=3.
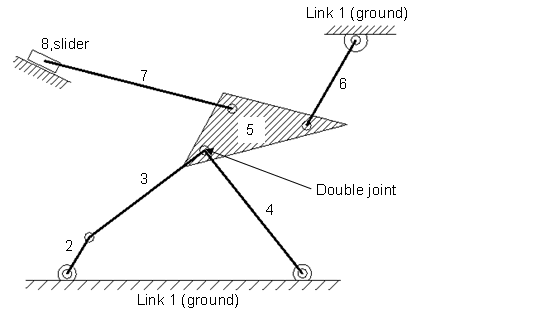
Uma junta dupla conta como 2, logo J=10 e todos os pares contêm 1 grau de mobilidade f_{i}=1.
DOF=3(8-1)-\sum_{i=1}^{10}(3-1)
DOF=24-3-2\cdot 10=1
E este aqui com uma roda? m=3 e N=4.

O par roda-superfície tem dois graus de liberdade, ou seja, f_{4}=2. Portanto, a equação fica:
DOF=3(4-1)-[(3-1)+(3-1)+(3-1)+(3-2)]
DOF=12-3-[3(3-1)+(3-2)]=9-3\cdot 2-1=2
Quantos graus de liberdade há no mecanismo mostrado anteriormente? m=3, N=8 (incluindo a superfície), J=9 e f_{i}=1.
[WPGP gif_id=”19424″ width=”600″]
DOF=3(8-1)-\sum_{i=1}^{9}(3-1)
DOF=24-3-9\cdot 2=24-3-18=3
Para aplicar a sistemas de três dimensões, considere m=6 e conte o DOF de todos os pares. Esta equação de Grübler pode ser simplificada para 2 dimensões.
DOF=3(N-1)-2J_{1}-J_{2}
- J_{1}: juntas com 1 DOF.
- J_{2}: juntas com 2 DOF.
E para 3 dimensões.
DOF=6(N-1)-5J_{1}-4J_{2}-3J_{3}-2J_{4}-J_{5}
Estas simplificações são chamadas de equações de Kutzbach. O número de atuadores necessários para acionar um mecanismo é igual ao número de graus de liberdade.
Graus de liberdade menor ou igual a zero
Quando o grau de liberdade ou mobilidade é igual a zero, quer dizer que é uma estrutura e não um mecanismo. Se for menor que 0, a estrutura está pré-carregada e tem um acúmulo de forças que geram uma tensão mecânica.

. O conceito na mecânica e como calcular DOF em um sistema mecânico.){kind=link}
One of the best reads I’ve had this week.
I’ll definitely be coming back for more.
Thank you for the comment.
Era para eu ter publicado este post antes, mas fiquei vários dias sem acesso a internet. A internet da VIVO é uma porcaria e cai o tempo todo. O problema ainda não foi resolvido.
Depois de vários dias, a internet voltou ao normal. Tive que ajudar o técnico a trocar os cabos subterrâneos. O problema não era diretamente da VIVO. Mas o atendimento não foi muito bom.