
Exoskeletons are wearable robots that can increase a person’s physical capabilities and protection. This technology only existed in science fiction.
The first exoskeletons
The first exoskeleton was created in 1890, by Russian Nicholas Yagn. Was patented in the USA and was called “Apparatus for facilitating walking, running, and jumping.
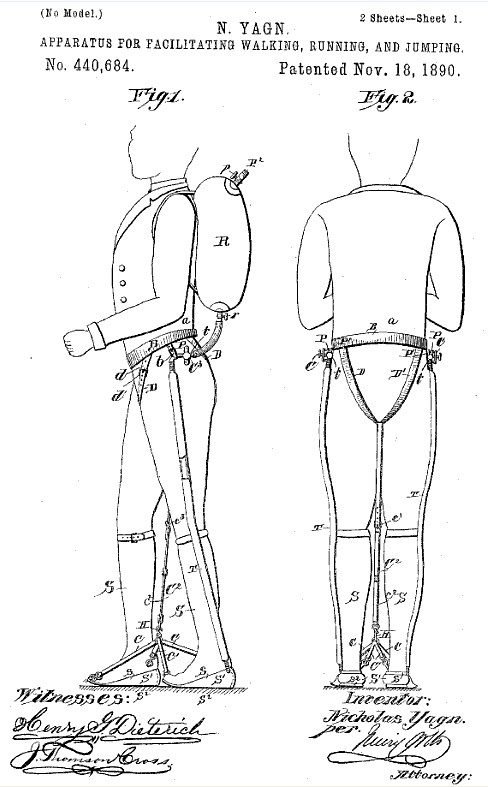
This exoskeleton was totally mechanical, used a set of springs and reduced fatigue to walk, run and jump. The final version had a tank with gas to store energy.
The first active exoskeleton
In November 1965, General Electric started the Hardiman project, the first active exoskeleton. It was a master-slave system with two arms and two legs. Active exoskeletons have their own energy source.

In the beginning, were used hydromechanical servos, but they had stability problems and were replaced by electrohydraulic servos. The Hardiman project wasn’t successful due to limitations of technology from that time. The exoskeleton was too hard to be controlled, movements were too abrupt. In addition to that, Hardiman couldn’t walk or stand without support.

How it works?
Mechanical exoskeletons
Passive exoskeleton is purely mechanical, transfer part of upper members’ weight to other body parts, such as center, waist, or hips. The uniform weight distribution reduces fatigue. The main advantage of mechanical exoskeletons is that they don’t need an external power source.
Electric exoskeletons
This type increases the user’s physical force with the help of actuators. These can be electric motors, artificial muscles, hydraulic or pneumatic pistons.
Control systems
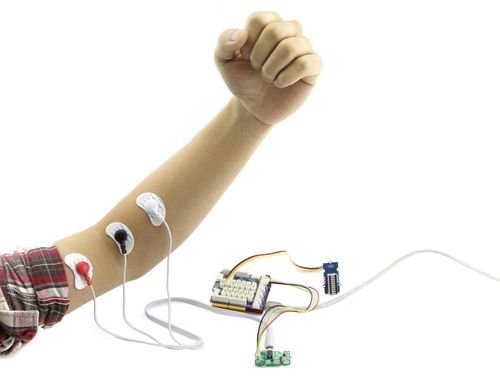
An exoskeleton must have many sensors. Usually are torque sensors at junctions or electromyographic sensors which detect electric activity produced by muscles’ movements. Sensors’ signals are sent to a controller that sends control signals to actuators follow the movement.
Exoskeletons with brain-machine interface are been developed, that can be controlled with thought. Are used electroencephalogram (EEG) or electrodes implanted on brain.
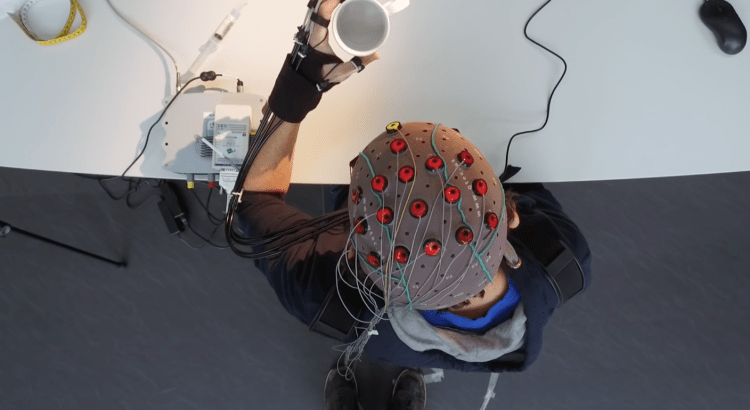
To know more about brain-machine interface, click on the following button.
Brain-machine interfaceClick here
Materials
Exoskeletons also can be classified according to the type of material that composes the structure. Classic or hard are the ones made of rigid materials and the light ones, made of fabric and light materials. The latters are more comfortable than rigid exoskeletons, but less powerful.
Power supply systems
Active exoskeletons need batteries to supply motors, sensors, and control systems. The batteries’ weight limits mobility and autonomy. The evolution of exoskeletons is directly related to batteries’ advance, which must be light, rechargeable, durable, and have high energy density.
Where exoskeletons will be used?
Already exist prototypes of military exoskeletons to increase physical capabilities of soldiers. For example, the Stormer’ ou ‘Shturmovik’, which has already been shown in the news about combat armor Sotnik.

Disable people can recover their movements.

Exoskeletons will increase productivity and will reduce fatigue of people who make hard work, like civil construction workers.

{kind=link}