
In this post, I will explain how servomotors work. I will give emphasis on RC servomotor, industrial, and AC. They are very useful in many applications.
RC servomotor
Servomotors are DC motors with a position sensor and a feedback circuit, in RC servos, the position sensor is a potentiometer. The drive gears connect the potentiometer to the DC motor.
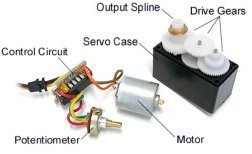
The servomotor assembled.

This is the flowchart of servo control circuit.
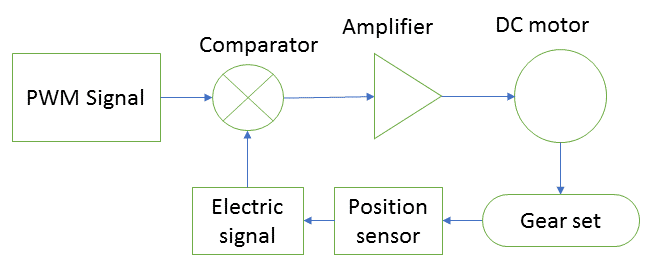
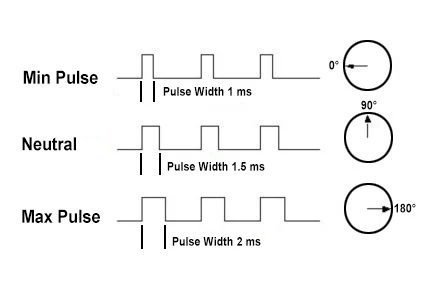
You can’t control the servomotor the same way you control a common DC motor, you need a PWM signal in a frequency to get a step angle, the step angle will vary according to the frequency and PWM. Pulse width and the angle depending on the servo. The comparator compares the PWM signal to the signal from the sensor, the output signal is amplified and the DC motor move until the output signal in the comparator is zero.
Industrial servomotor

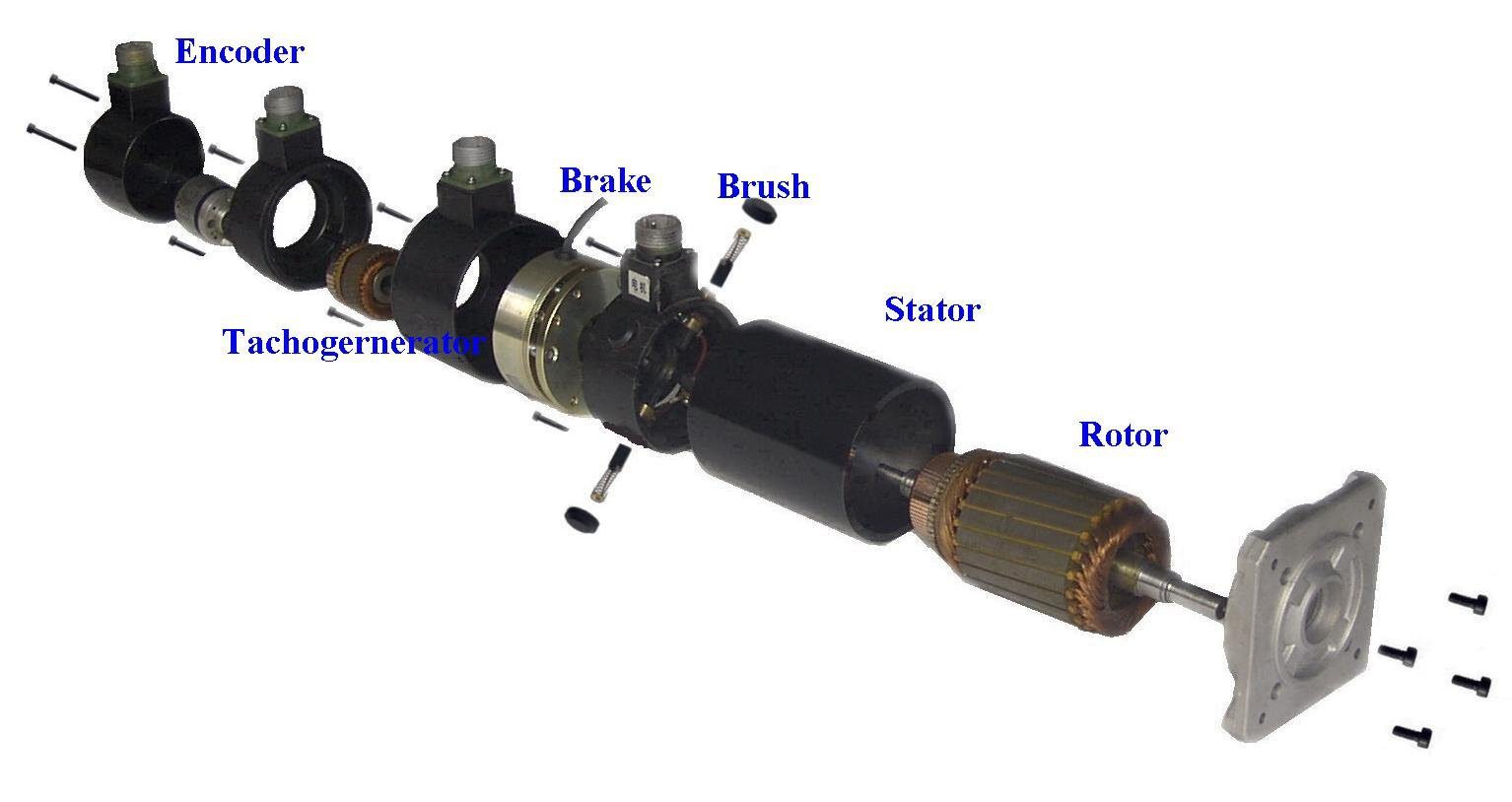
Industrial servos work like the RC servos, the main difference is that the position sensor is an encoder, which gives information about speed and position.
AC servomotors
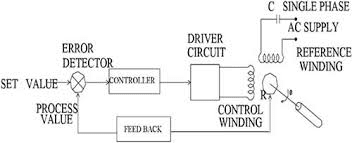
We have two types of AC servos: Induction and synchronous. I will write a post dedicated to induction and synchronous motors. The figure below shows the control system of an AC servo. You can control the position in the control winding by a set value.
Induction AC servomotors

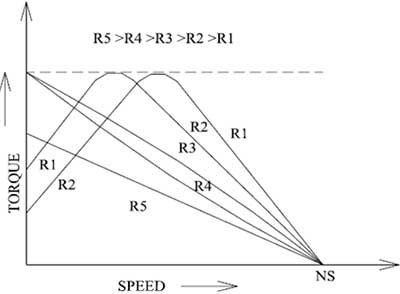
Those types of servos are induction motors with 2 phases and a rotor as squirrel cage and are used for low power applications. The 3 phase servos are used to high power applications. The cage bars are thinner than common induction motors to increase the resistance to have a linear rate between torque and speed. This graphic shows the relation between torque and speed in an induction AC servo with differents values for rotor resistance.
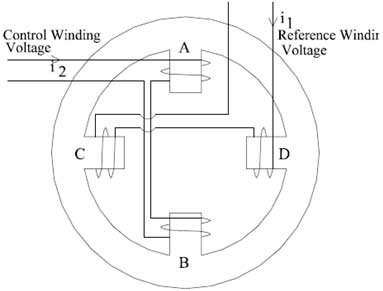
This is the stator of an induction AC servo, the winding must have a 90ᵒ phase difference.
Synchronous AC servo

Also known as brushless servo, the rotor has a permanent magnet which rotates by a magnetic field created in the stator at synchronous speed. It has the same stator as the induction AC servo.

{kind=link}