Neste tutorial, é mostrado como controlar motores de passo com Arduino. Além de um exemplo de projeto.
Já escrevi um post descrevendo o funcionamento dos motores de passo, clique no botão para acessar o post.
Circuitos integrados para controle de motores de passo
Um motor de passo deve ser controlado por sinais digitais e estes devem ser amplificados por transistores no modo Darlington. Este modo é um par de transistores posicionados de forma que se comportam como um único transistor. O ganho de um par Darlington é o produto do ganho dos dois transistores. Por exemplo, se os dois transistores têm ganho de 100, o ganho do par será 10.000. Este é um par Darlington do circuito integrado ULN2004APG. Estes pares têm a função de amplificar a corrente para carregar as bobinas dos motores de passo.

Cada triângulo com círculo no diagrama é um par Darlington.

Existem outros chips com o prefixo ULN que tem a mesma função. Neste post é usado o ULN2004APG como exemplo.
Controlando um motor de passo

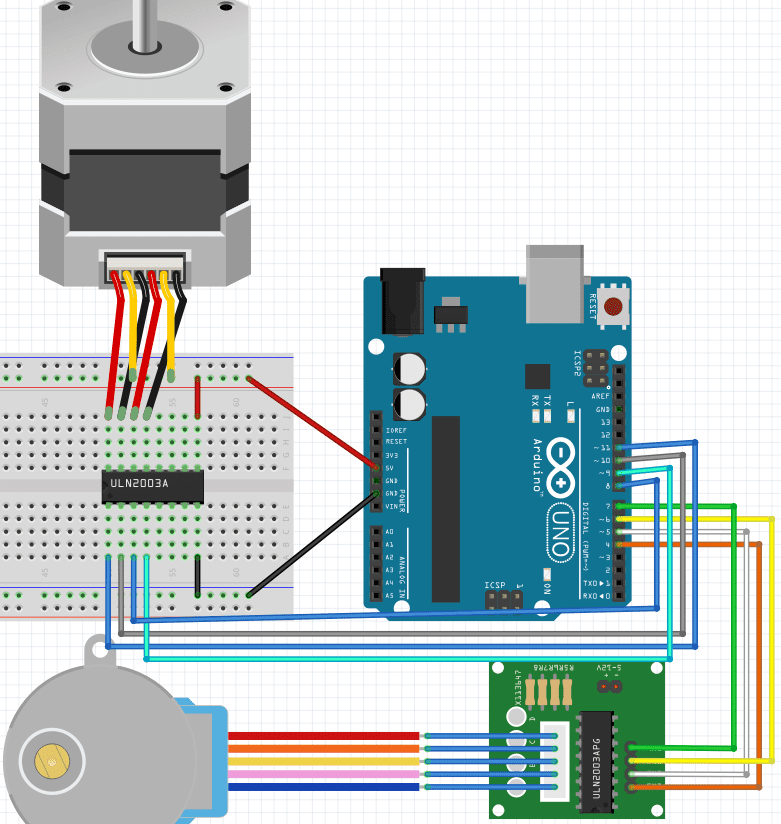
Aqui é mostrado como controlar um motor de passo unipolar AK57HY da Akiyama, usando Arduino e o chip ULN2004APG. Esta é a configuração dos fios deste motor, o datasheet está neste link.

Este é o esquemático para conectar o motor ao Arduino. Usei o ULN2003A no software, mas a ligação é a mesma do ULN2004.

Este é o algoritmo que faz o motor de passo girar. A biblioteca Stepper.h facilita a implementação do código.

Shield para motores de passo
Aqui é mostrado o controle de um motor de passo bipolar 28BYJ-48 com um shield mostrados abaixo.

Desta vez, é demonstrado como mudar o sentido de rotação do motor. Estes são o esquemático e o algoritmo respectivamente. O motor deve girar 180 graus em um sentido e depois 180 graus no sentido oposto.


Braço robótico com motores de passo
Este é um projeto de braço robótico apenas com motores de passo. O motor de base é o AK56H da Akiyama e é controlado pelo chip ULN2004APG.

O motor de passo de cima é o 28BYJ-48 e é controlado pelo seu circuito de driver. O esquemático e o código respectivamente.

O braço robótico completo.

O video do braço em operação.