
O assunto deste post é o volume de trabalho na robótica. Robôs manipuladores são classificados de acordo com este importante conceito.
O que é o volume de trabalho?
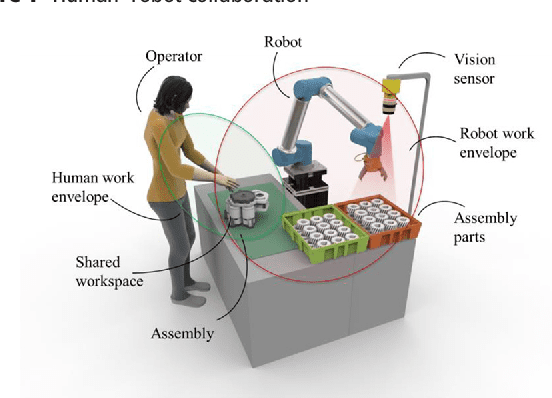
É o espaço com uma forma geométrica onde um robô manipulador pode operar. Depende dos graus de liberdade, do tamanho do robô, dos tipos de atuadores e do alcance do efetor final, que é a parte do robô que interage com o ambiente, como por exemplo, uma garra.

A importância do volume de trabalho
O volume de trabalho determina a melhor aplicação para o robô. Na hora de escolher ou projetar um robô para uma tarefa, devem ser definidos a forma e o tamanho do volume de trabalho no local de operação. Em algumas situações, o volume deve ser limitado por sensores que enviam sinais para o controlador para evitar acidentes.
Classificação dos robôs industriais e os volumes de trabalho
Robôs de coordenadas cartesianas

Se movem nas coordenadas cartesianas x, y e z. Todos os atuadores devem ser lineares. Portanto, o volume de trabalho será um paralelepípedo. Os robôs cartesianos têm o controle mais simples.
Robôs de coordenadas cilíndricas

Se a junta da base for rotacional, o manipulador se move nas coordenadas cilíndricas.

Este tipo de robô possui uma zona morta, onde não pode operar devido ao tamanho e à limitação de movimento do atuador linear. Esta zona morta fica dentro do cilindro de trabalho.
Robôs de coordenadas esféricas ou polares

Com 2 atuadores rotacionais e um linear, o robô se move em coordenadas esféricas.


Robôs articulados

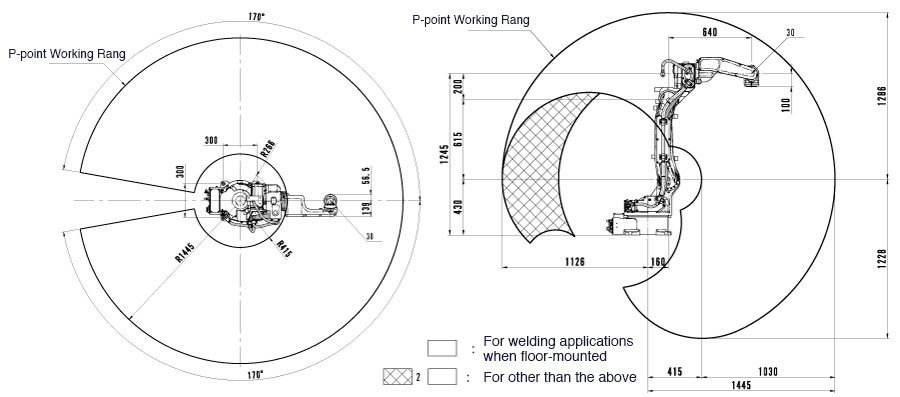
Todos os atuadores dos robôs articulados são rotacionais. A zona morta é menor do que a do robô esférico, em relação ao volume de trabalho.
SCARA

É a abreviatura de Braço Robótico de Montagem de Conformidade. Tem dois atuadores rotativos e um linear, como na configuração polar, a junta linear atua na vertical.

Delta

Este tipo é usado para pegar e colocar pequenos objetos com grandes precisão e velocidade. Possui 3 paralelogramos articulados, conectados a uma plataforma fixa e acionados por motores que estão a 120° de distância entre si. O efetor final está ligado a uma plataforma móvel. O volume de trabalho é a metade de uma esfera. O vídeo a seguir mostra como se move um robô delta.


