
This post’s subject is an introduction to classical control theory. Where is used PID controller, with only one input and one output.
Open and closed-loop
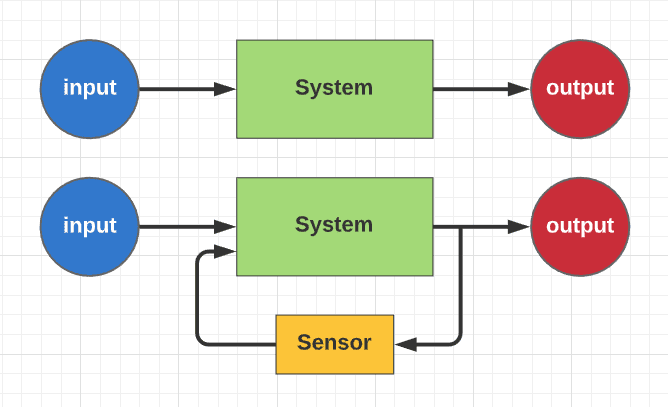
These are two types of control systems. In an open loop, the output doesn’t influence the control. Sometimes, it is necessary for a human operator to control the input, serving as feedback to obtain the desired output. While in closed-loop, exist one or more sensors and feedback, which allows the automatic controller to make adjustments to obtain the required output.
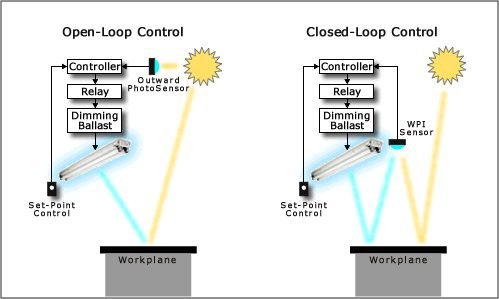
Control systems that operate in time function, like traffic lights, are open-loop.
Components and variables of classical control system
To better understanding, was used a water level control system in a reservoir as an example. Usually, reservoir level sensors have buoys and transmit an electric signal to the controller.
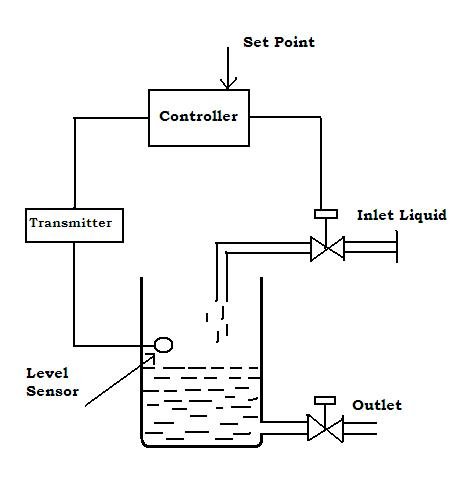

The controlled variable is the water level. Control variables are inlet and outlet flow. Reference level is the value that must be obtained, technically called setpoint. The control valves, water supply, and reservoir are called process.

Error is the difference between setpoint and value measured by the sensor. In many control systems of open and closed-loop, disturbances and noises must be considered.

Each one of the blocks and variables is represented by a function in time or s domains. This block diagram and variables can be applied to any type of system, wherever it’s hydraulic, electronic, thermal, pneumatic, etc.
Transient response
When there is a change in setpoint, the output transient response can be underdamped, overdamped, or critically damped.
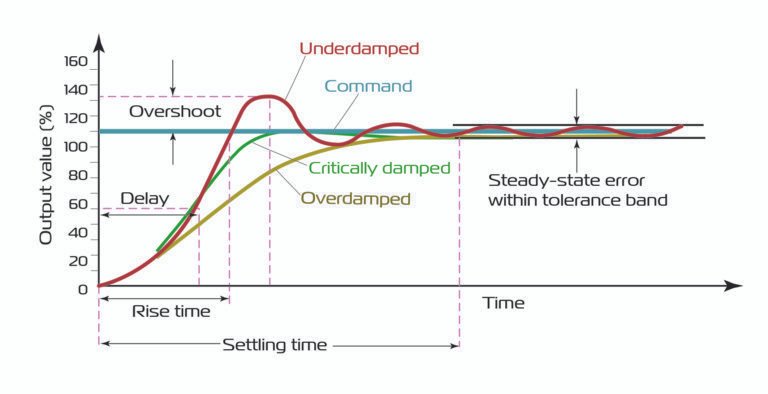
A system with an overdamped response will take too long to get the setpoint. On the other hand, an underdamped response will causes the overshoot, difference between setpoint, and peak response. Imagine an elevator with an underdamped response from the ground to 10th floor. The best answer for the big majority of systems is critically damped. Mathematical models will be for another post.

{kind=link}