É possível controlar um braço robótico sem microcontrolador, usando circuitos eletrônicos simples. Neste post é mostrado como.
O circuito eletrônico
O servomotor
Antes de construir o circuito eletrônico, deve ser definido qual servomotor usar no braço robótico. Foi escolhido o microsservo 9g SG90 da Tower Pro.

O datasheet deste servo pode ser acessado neste link.
Montando o circuito eletrônico
Cada servomotor pode ser controlado por um circuito 555 que gera um sinal de onda quadrada e controla a largura de pulso deste sinal.

Clique no botão abaixo para acessar o post sobre Modulação de Largura de Pulso.
A placa eletrônica que vai controlar os 4 servomotores do braço robótico.

A fonte CC emite sinais de interferência que fazem os servomotores tremerem durante o movimento. Para evitar isto, foram colocados capacitores em paralelo com os terminais de alimentação (o capacitor Cp no esquemático). O valor mínimo deve ser de 220 μF. Coloquei 3 de 220 μF e 1 de 470 μF. São 4 capacitores no total, porque são usados 4 circuitos, um para cada servomotor.
Lista completa:
- 4 chips 555.
- 4 potenciômetros de 10 kΩ.
- 8 diodos 1N4148.
- 4 resistores 1,5 kΩ.
- Fios.
- 4 capacitores eletrolíticos 1 μF x 50 V.
- 4 capacitores eletrolíticos 220 μF x 16 V.
- Placa de circuito impresso 15 x 3,7 cm.
Montando o braço robótico
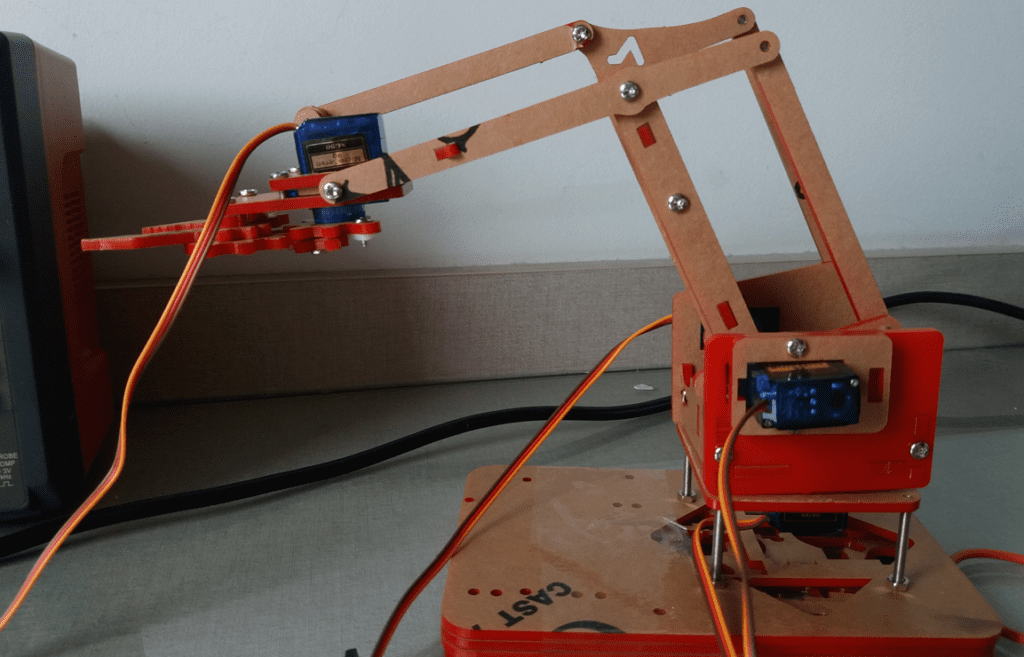
O braço robótico é feito de acrílico e tem 4 graus de liberdade. Neste post, eu mostro passo a passo a montagem.
Base
As peças para montar a base.

Montando as peças.

O servo deve ser colocado no espaço retangular acima, usando esta parte.


Além dos 4 primeiros parafusos, este kit contém outros 3 tipos.

Para cada buraco, deve ser usado o parafuso de comprimento certo para segurar 2 ou mais partes. A ponta do parafuso não pode ficar exposta.


Caixa móvel
Cada servo SG90 vem com 3 parafusos e 3 flanges de plástico, conforme mostra a figura abaixo.

A peça acima é a base da caixa móvel que deve ficar ligada ao servo da base.

Os parafusos mais longos que vêm com os servos, devem ser usados para ligar a flange às partes de acrílico.

Montando um dos lados.





O parafuso mais curto que acompanha o SG90 serve para prender a flange ao eixo do servomotor.

O outro lado não é muito diferente.





Montando a parte do meio.


Juntando as partes da caixa móvel.

Os parafusos longos e as porcas encaixam as peças laterais.

A caixa móvel deve ficar assim.

Articulação
Para construir a articulação, primeiro deve-se usar esta parte.

Para ligar as peças longas com parafusos longos e porcas.

Mostrando as peças e como instalá-las no braço robótico.




Nesta parte deve-se usar uma porca.





Vista frontal mostrando o arranjo das peças na última parte da articulação.

Garra
Primeiro, deve-se colocar estas peças no servomotor.






Partes que ligam o servo à garra.

A flange deve ser presa a esta parte com um parafuso que vem com o SG90.



Finalizando a garra.




Ligando a garra à articulação.


Usando parafusos de comprimento médio para encaixe lateral.


Usando os dois últimos anéis.